 Mazda CX-3 - Manual do Proprietário > Vista Superior/Vista Dianteira
Mazda CX-3 - Manual do Proprietário > Vista Superior/Vista Dianteira
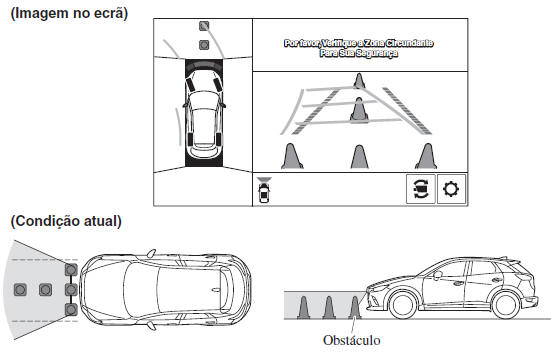
Utilize a vista superior/vista dianteira para verificar a segurança da zona circundante ao veículo, quando pretender iniciar a marcha do veículo, estacionar ou parar o veículo.
Indicação da distância
NOTA
- No ecrã da vista superior, as áreas pretas na dianteira e na traseira da imagem do veículo e as junções das imagens de cada câmara, são ângulos mortos.
- Como as imagens apresentadas na vista superior são processadas a
partir de cada
câmara, o ecrã da vista superior poderá indicar uma imagem das seguintes
formas.
- Se qualquer uma das câmaras captar uma imagem que contenha um objeto com uma cor flagrante, todo o ecrã poderá ser afetado e poderá apresentar uma imagem naquela cor.
- Os obstáculos apresentados na vista dianteira poderão não ser apresentados no ecrã da vista superior.
- Se a posição ou o ângulo de cada câmara variar devido à inclinação do veículo, a imagem poderá surgir distorcida.
- As marcas rodoviárias na estrada poderão surgir distorcidas nas junções das imagens de cada câmara.
- Todo o ecrã poderá aparentar mais brilhante/escuro em função do nível de luminosidade em torno das câmaras.
Visualização do ecrã
| Indicação/Ícone | Conteúdo | |
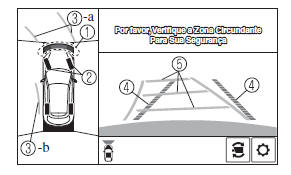
| 1 | Vista dos sensores de estacionamento | Indica a condição de deteção dos sensores de estacionamento
quando estão ativados.
Para mais informações, por favor consulte a indicação da deteção de obstáculos dos sensores de estacionamento e o aviso sonoro. |
| 2 | Ícone do pneu | Indica a direção do pneu. Move-se em função das manobras no volante. |
| 3 | Linhas do percurso projetado do veículo (âmbar) | Indica o percurso projetado aproximado do veículo. Move-se
em função das manobras no volante.
a) Indica o percurso que a extremidade do para-choques dianteiro deverá percorrer. b) Indica o percurso que o lado interior do veículo deverá percorrer. |
| 4 | Prolongamento das linhas da largura do veículo e linhas guia de distância (vermelho/ azul) | Indica a largura aproximada do veículo e a distância (a partir
da extremidade dianteira do para-choques) em frente ao veículo.
|
| 5 | Linhas guia de distância do percurso projetado do veículo (vermelho/âmbar) | Indica a distância (a partir da extremidade dianteira do para-
choques) em frente ao veículo.
|
CUIDADO
O alcance de deteção dos sensores de estacionamento é limitado. Por exemplo, a aproximação dos obstáculos ao lado do veículo e os obstáculos de baixa altura, poderão não ser detetados. Verifique sempre visualmente a zona circundante do veículo quando estiver a realizar manobras.
Para mais informações, por favor consulte a indicação da deteção de obstáculos dos sensores de estacionamento e o aviso sonoro.
NOTA
A configuração pode ser alterada de modo a que as linhas do percurso projetado do veículo não sejam visualizadas.
Como utilizar a função das linhas do percurso projetado do veículo
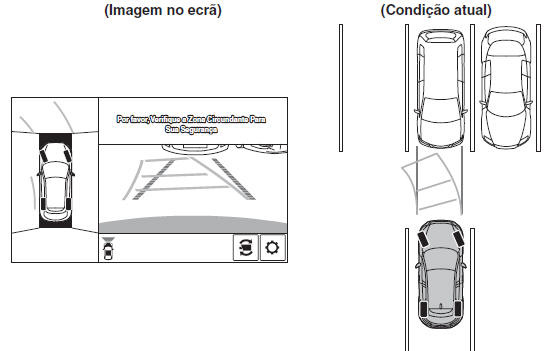
Certifique-se de que não existem obstáculos abrangidos pelas linhas do percurso projetado do veículo.
Conduza o veículo em marcha para a frente enquanto manobra o volante, por forma a que os obstáculos não sejam abrangidos pelas linhas do percurso projetado do veículo.
